Robotics Terms, Definitions & Examples
3D Graphic Display Function
The 3D Graphic Display Function (henceforth described as 3D Display Function) is that, a 3D model of the robot is displayed on the programming pendant window, and the current value of the robot can be confirmed. By using the multi-window function, the job's teaching position displayed in the job content can also be confirmed on the 3D display window. When the functional safety function is valid, the functional safety range can also be displayed.
Absolute Data (ABSO Data)
Absolute Data (ABSO Data) is a correction factor for data that establishes an indicated value of zero when the robot is at the predetermined Home (calibration position).
Accuracy
Accuracy is the measurement of the deviation between the command characteristic and the attained characteristic (R15.05-2), or the precision with which a computed or calculated robot position can be attained. Accuracy is normally worse than the arm's repeatability. Accuracy is not constant over the workspace, due to the effect of link kinematics.
Active Compliant Robot
An active compliant robot is one in which motion modification during the performance of a task is initiated by the control system. The induced motion modification is slight, but sufficient to facilitate the completion of a desired task.
Actual Position
The position or location of the tool control point. Note that this will not be exactly the same as the demand position, due to a multitude of unsensed errors, such as link deflection, transmission irregularity, tolerances in link lengths, etc.
Actuator
A power mechanism used to effect motion, or maintain position of the robot (for example, a motor which converts electrical energy to effect motion of the robot) (R15.07). The actuator responds to a signal received from the control system.
Arm
An interconnected set of links and powered joints comprising a robot manipulator that supports and/or moves a wrist and hand or end-effector through space. The arm itself does not include the end-effector.
See Manipulator, End-effector and Wrist.
Articulated Manipulator
A manipulator with an arm that is broken into sections (links) by one or more joints. Each of the joints represents a degree of freedom in the manipulator system and allows translation and rotary motion.
Articulation
Describes a jointed device, such as a jointed manipulator. The joints provide rotation about a vertical axis, and elevation out of the horizontal plane. This allows a robot to be capable of reaching into confined spaces.
Assembly Robot
A robot designed specifically for mating, fitting, or otherwise assembling various parts or components into completed products. Primarily used for grasping parts and mating or fitting them together, such as in assembly line production.
Automatic Measurement Function
For optimal robot motion, the mass properties of the end-effector should be specified. These properties can be derived from a CAD model of the tool. The Automatic Measurement Function is an alternative to a CAD model, and it uses the robot arm itself to measure the tool properties. With this function, the user can register the load of tool, the position of the tools center of gravity and the moment of inertia at the center of gravity.
Automatic Mode
See Play Mode.
Axis
A direction used to specify the robot motion in a linear or rotary mode. (ISO 8373)
Axis Interference
The Axis Interference Area is a function that judges the current position of each axis and outputs a signal based on whether the current position is within a predefined range.
Base
The stable platform to which an industrial robotic arm is attached.
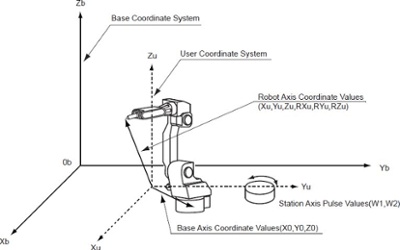
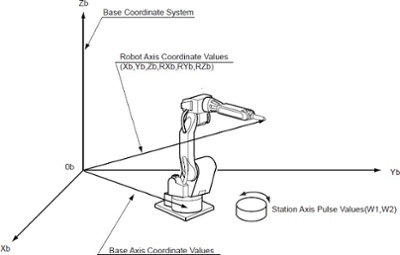 Base Coordinate System
Base Coordinate System
The Base Coordinate System (sometimes referred to as World Coordinate System) defines a common reference point for a cell or application. This is useful when using multiple robots or devices as positions defined in Base Coordinates will be the same for all robots and devices. (see figure at right)
Base Link
The stationary base structure of a robot arm that supports the first joint.
Burn-in
Burn-In is a robot testing procedure where all components of the robot are operated continuously for an extended period of time. This is done to test movement and movement programming of the robot at early stages to avoid malfunctions after deployment.
Computer Aided Design (CAD)
Computer Aided Design (CAD). Computer graphic applications designed to allow engineering of objects (or parts), which are to be manufactured. A computer is used as a tool to design schematics and produce blueprints, which enable the accurate production of the object. The CAD system enables the three dimensional drawings of basic figures, exact sizing and placement of components, making lines of specified length, width, or angle, as well as satisfying varying geometric shapes. This system also allows the designer to test a simulated part under different stresses, loads, etc.
Carousel
A rotating platform that delivers objects to a robot and serves as an object queuing system. This carousel delivers the objects, or work pieces, to the loading/unloading station of the robot.
Cartesian Coordinates
Cartesian Coordinates is a type of coordinate system that specifies the location of a point in two dimensional space by a pair of numerical numbers, which further specify the distance to fixed axes that are perpendicular to each other. In simple terms, an XY graph represents a two dimensional Cartesian Coordinate System. When a point is specified in a three dimensional space (XYZ graph), it constitutes a three dimensional Cartesian coordinate system. A robot’s TCP position is specified in a Cartesian Coordinate.
Cartesian Manipulator
A Cartesian Manipulator is a robot arm with prismatic joints, which allows movement along one or more of the three- axes in the X, Y, Z coordinate system.
Cartesian Topology
A topology, which uses prismatic joints throughout, normally arranged to be perpendicular to each other.
Cartesian-coordinate Robot
A Cartesian-coordinate Robot is a robot whose manipulator-arm degrees of freedom are defined by Cartesian Coordinates. This describes motions that are east-west, north-south and up-down, as well as rotary motions to change orientation.
Category 3 (Cat3)
Category 3 (Cat 3) means that the safety related parts of the control system will be designed so that:
-
Single faults will not prevent the safety function from working correctly.
-
Single faults will be detected at or before the next demand of the safety function.
-
When a single fault does occur, a safe state shall be maintained until the detected fault is corrected.
-
All reasonably foreseeable faults are detected.
Centrifugal Force
When a body rotates about an axis other than one at it's center of mass, it exerts an outward radial force called centrifugal force upon the axis, which restrains it from moving in a straight tangential line. To offset this force, the robot must exert an opposing torque at the joint of rotation.
Circular Motion Type
A calculated path that the robot executes, and is circular in shape.
Clamp
An end-effector which serves as a pneumatic hand that controls the grasping and releasing of an object. Tactile, and feed-back force sensors are used to manage the applied force to the object by the clamp. See End-effector.
Clamping
The maximum permissible force acting on a body region, resulting from a robot collision where the period of contact results in a plastic deformation of a person’s soft tissue.
Clamping Force
When contact can cause a body part(s) to be clamped.
Closed-loop
Control achieved by a robot manipulator by means of feedback information. As a manipulator is in action, its sensors continually communicate information to the robot's controller, which is used to further guide the manipulator within the given task. Many sensors are used to feed back information about the manipulator's placement, speed, torque, applied forces, as well as the placement of a targeted moving object, etc. See Feedback.
Collaborative Robot
Term used to describe a robot system designed to operate in one or more of the four collaborative modes.
Command Interpreter
A module or set of modules that determines what the received command means. The command is broken down into parts (parsed) and processed.
Command Position
The endpoint position of a robot motion that the controller is trying to achieve.
Compliance
Displacement of a manipulator in response to a force or torque. A high compliance means the manipulator moves a good bit when it is stressed. This is called spongy or springy. Low compliance would be a stiff system when stressed.
Compliant Robot
A robot that performs tasks, with respect to external forces, by modifying its motions in a manner that minimizes those forces. The indicated or allowed motion is accomplished through lateral (horizontal), axial (vertical) or rotational compliance.
Configuration
The arrangement of links created by a particular set of joint positions on the robot. Note that there may be several configurations resulting in the same endpoint position.
Contact Sensor
A device that detects the presence of an object or measures the amount of applied force or torque applied on the object through physical contact with it. Contact sensing can be used to determine location, identity, and orientation of work pieces.
Continuous Path
Describes the process where by a robot is controlled over the entire path traversed, as opposed to a point-to-point method of traversal. This is used when the trajectory of the end-effector is most important to provide a smooth movement, such as in spray painting etc. See Point-to-Point.
Control Algorithm
A monitor used to detect trajectory deviations in which sensors detect such deviations and torque applications are computed for the actuators.
Control Command
An instruction fed to the robot by means of the human-to-machine input device. See Pendant (Teaching). This command is received by the robot's controller system and is interpreted. Then, the proper instruction is fed to the robot's actuators, which enable it to react to the initial command. Many times, the command must be interpreted with the use of logic units and specific algorithms. See Input Device and Instruction Cycle.
Control Device
Any piece of control hardware providing a means for human intervention in the control of a robot or robot system, such as an emergency-stop button, a start button, or a selector switch. (R15.06)
Control Mode
The means by which instructions are communicated to the robot.
Controllability
The property of a system by which an input signal can take the system from an initial state to a desired state along a predictable path within a predetermined period of time.
Controller
An information processing device whose inputs are both the desired and measured position, velocity or other pertinent variables in a process and whose outputs are drive signals to a controlling motor or actuator. (R15.02)
Controller System
The robot control mechanism is usually a computer of some type, which is used to store data (both robot and work environment), and store and execute programs, which operate the robot. The Controller System contains the programs, data, algorithms; logic analysis, and various other processing activities, which enable it to perform. See Robot.
Coordinate System or Frame
A Coordinate System (or Frame) defines a reference position and orientation from which a robot position can be measured. All robot positions are defined with reference to a Coordinate System. Yaskawa robots utilize the following Coordinate Systems:
Central Processing Unit (CPU)
The Central Processing Unit (CPU) is the main circuit board and processor of the Controller System.
Cubic Interference Area
This area is a rectangular parallelepiped, which is parallel to the base coordinate, robot coordinate or user coordinate. The YRC1000 controller judges whether the current position of the manipulator’s TCP is inside or outside this area, and outputs this status as a signal.
Cycle
A single execution of a complete set of moves and functions contained within a robot program. (R15.05-2)
Cyclic Coordinate System
A coordinate system that defines the position of any point in terms of an angular dimension, a radial dimensionand a height from a reference plane. These three dimensions specify a point on a cylinder.
Cyclo Drive
A brand name for a speed reduction device that converts high speed low torque to low speed high torque, usually used on the major (larger) axis.
Cylindrical Topology
A topology where the arm follows a radius of a horizontal circle, with a prismatic joint to raise or lower the circle. Not popular in industry.
Dead Man Switch
Deprecated term. See Enabling Device.
Degrees of Freedom
The number of independent directions or joints of the robot (R15.07), which would allow the robot to move its end effector through the required sequence of motions. For arbitrary positioning, 6 degrees of freedom are needed: 3 for position (left-right, forward-backward and up- down), and 3 for orientation (yaw, pitch and roll).
Direct-drive
Joint actuation, including no transmission elements (i.e., the link is bolted onto the output of the motor.)
Downtime
A period of time, in which, a robot or production line is shut down, due to malfunction or failure. See Uptime.
Drive
A speed (gear) reducer to convert high speed low torque to low speed high torque. See Harmonic Drive, Cyclo Drive and Rotary Vector Drive).
Drop Delivery
A method of introducing an object to the workplace by gravity. Usually, a chute or container is so placed that, when work on the part is finished, it will fall or drop into a chute or onto a conveyor with little or no transport by the robot.
Dynamics
The study of motion, the forces that cause the motion and the forces due to motion. The dynamics of a robot arm are very complicated as they result from the kinematical behavior of all masses within the arm's structure. The robot arm kinematics are complicated in themselves.
Emergency Stop
The operation of a circuit using hardware-based components that overrides all other robot controls, removes drive power from the robot actuators, and causes all moving parts to stop. (R15.06)
Enable Switch
See Enabling Device.
Enabling Device
A manually operated device which when continuously activated, permits motion. Releasing the device shall stop robot motion and motion of associated equipment that may present a hazard. (R15.06)
Encoder
A feedback device in the robot manipulator arm that provides current position (and orientation of the arm) data to the controller. A beam of light passes through a rotating code disk that contains a precise pattern of opaque and transparent segments on its surface. Light that is transmitted through the disk strikes photo-detectors, which convert the light pattern to electrical signals. See Feedback, Closed-loop Control and Feedback Sensor.
EOAT
See Gripper or End-effector.
End-effector
An accessory device or tool, specifically designed for attachment to the robot wrist or tool mounting plate to enable the robot to perform its intended task. (Examples may include: gripper, spot weld gun, arc weld gun, spray point gun or any other application tools.) (R15.06)
Endpoint
The nominal commanded position that a manipulator will attempt to achieve at the end of a path of motion. The end of the distal link.
Error
The difference between the actual response of a robot and a command issued.
Expandability
Being able to add resources to the system, such as memory, larger hard drive, new I/O card, etc.
External Force Limit
The threshold limit where the robot moves to or retains position, even when external forces are applied (provided that forces do not exceed limits that would cause an error).
Feedback
The return of information from a manipulator or sensor to the processor of the robot to provide self-correcting control of the manipulator.
See Feedback Control and Feedback Sensor.
Feedback Control
A type of system control obtained when information from a manipulator or sensor is returned to the robot controller in order to obtain a desired robot effect. See Feedback, Closed-loop Control and Feedback Sensor.
Feedback Sensor
A mechanism through which information from sensing devices is fed back to the robot's control unit. The information is utilized in the subsequent direction of the robot's motion. See Closed-loop Control and Feedback Control.
Flexibility
The ability of a robot to perform a variety of different tasks.
Force Feedback
A sensing technique using electrical signals to control a robot end-effector during the task of the end-effector. Information is fed from the force sensors of the end-effector to the robot control unit during the particular task to enable enhanced operation of the end-effector.
See Feedback, Feedback Sensor and Force Sensor.
Force Sensor
A sensor capable of measuring the forces and torque exerted by a robot and its wrist. Such sensors usually contain strain gauges. The sensor provides information needed for force feedback. See Force Feedback
Forward Kinematic Solution
The calculation required to find the endpoint position, given the joint positions. For most robot topologies this is easier than finding the inverse kinematic solution.
Forward Kinematics
Computational procedures which determine where the end-effector of a robot is located in space. The procedures use mathematical algorithms along with joint sensors to determine its location.
Frame
A coordinate system used to determine a position and orientation of an object in space, as well as the robot's position within its model.
Functional Safety Unit (FSU)
The Functional Safety Unit (FSU) is a component of the Yaskawa robot controller that provides programmable safety functions that enable collaborative operation of the robot. As these safety functions are programmable, the FSU allows the minimization of nearby overall equipment footprint, as well as human accessible areas. The FSU consists of two parallel Central Processing Units (CPUs) run concurrently, thereby providing dual channel checking. In addition, the FSU acquires robot position from its encoders independently from the motion control system of the robot. Based on this feedback, the FSU monitors the manipulator and tool’s position, speed and posture.
Gantry
An adjustable hoisting machine that slides along a fixed platform or track, either raised or at ground level along the X, Y, Z axes.
Gantry Robot
A robot which has three degrees of freedom along the X, Y and Z coordinate system. Usually consists of a spooling system (used as a crane), which when reeled or unreeled provides the up and down motion along the Z axis. The spool can slide from left to right along a shaft which provides movement along the Z axis. The spool and shaft can move forward and back along tracks which provide movement along the Y axis. Usually used to position its end effector over a desired object and pick it up.
Gravity Loading
The force exerted downward, due to the weight of the robot arm and/or the load at the end of the arm. The force creates an error with respect to position accuracy of the end effector. A compensating force can be computed and applied bringing the arm back to the desired position.
Gripper
An end effector that is designed for seizing and holding (ISO 8373) and "grips" or grabs an object. It is attached to the last link of the arm. It may hold an object using several different methods, such as: applying pressure between its "fingers", or may use magnetization or vacuum to hold the object, etc. See End-effector.
Hand
A clamp or gripper used as an end-effector to grasp objects. See End-effector, Gripper.
Hand Guiding
Collaborative feature that allows an operator to hand guide the robot to a desired position. This task can be achieved by utilizing additional external hardware mounted directly to the robot or by a robot specifically designed to support this feature. Both solutions will require elements of functional safety to be utilized. A risk assessment shall be used to determine if any additional safeguarding is necessary to mitigate risks within the robot system.
Harmonic Drive
Compact lightweight speed reducer that converts high speed low torque to low speed high torque. Usually found on the minor (smaller) axis.
Harness
Usually several wires, bundled together to deliver power and/or signal communications to/from devices. For example, the robot motors are connected to the controller through a wire harness.
Hazardous Motion
Unintended/unexpected robot motion that may cause injury.
Hold
A stopping of all movements of a robot during its sequence, in which some power is maintained on the robot. For example, program execution stops, however power to the servo motors remain on, if restarting is desired.
Home Position
A known and fixed location on the basic coordinate axis of the manipulator where it comes to rest, or to an indicated zero position for each axis. This position is unique for each model of manipulator. On Motoman® robots there are indicator marks that show the Home position for the respective axis.
IEC
International Electrotechnical Commission
Inductive Sensor
The class of proximity sensors, which has half of a ferrite core, whose coil is part of an oscillator circuit. When a metallic object enters this field, at some point, the object will absorb enough energy from the field to cause the oscillator to stop oscillating. This signifies that an object is present in a given proximity. See Proximity Sensor.
Industrial Robot
A re-programmable multifunctional manipulator designed to move material, parts, tools or specialized devices through variable programmed motions for the performance of a variety of tasks (R15.06). The principle components are: one or more arms that can move in several directions, a manipulator, and a computer controller that gives detailed movement instructions.
INFORM
The robot programming language for Yaskawa robots. INFORM language allows the robot user to: instruct the robot to use its basic capabilities to fulfill a defined set of expectations and also to describe to the robot, through a definition of parameters and conditions, what the expectations are in some given situations or scenarios. In simple terms, the INFORM programming language allows the user to instruct the robot on what to do, when to do it, where to do it and how to do it.
Input Devices
A variety of devices, which allow a human to machine interface. This allows the human to program, control, and simulate the robot. Such devices include programming pendant, computer keyboards, a mouse, joy-sticks, push buttons, operator panel, operator pedestal etc.
Instruction
A line of programming code that causes action from the system controller. See Command position.
Instruction Cycle
The time it takes for a robot controller system's cycle to decode a command or instruction before it is executed. The Instruction Cycle must be analyzed very closely by robotic programmers to enable speedy and proper reaction to varying commands.
Integrate
To fit together different subsystems, such as robots and other automation devices, or at least different versions of subsystems in the same control shell.
Integrator
A company that provides value added services that results in creation of automation solutions by combining a robot and other automation and controls equipment to create an automation solution for end users.
Intelligent Robot
A robot that can be programmed to make performance choices contingent on sensory inputs with little or no help from human intervention. See Robot.
Interference Area
Interference Area is a function that prevents interference between multiple manipulators or the manipulator and peripheral device. The areas can be set up to 64 areas. Three types of methods to use each interference area are as follows: Cubic Interference, Outside of Cubic Area and Axis Interference.
Interpolation
The method by which endpoint paths are created. In general, to specify a motion a few knot points are defined before all the intermediate positions between them are calculated by mathematical interpolation. The interpolation algorithm used therefore has a dramatic effect of the quality of motion.
ISO
International Organization for Standardization
ISO 10218-1 Robots and robotic devices — Safety requirements for industrial robots — Part 1: Robots
A robot specific safety specification that addresses manufacturer requirements, functionality, required safety performance, hazards, protective measures and documentation for the robot itself.
ISO 10218-2 Robots and robotic devices — Safety requirements for industrial robots — Part 2: Robot systems and integration
A companion document to ISO 10218-1. This safety specification provides guidance to both end users and robot integrators as it pertains to the safe design, Installation and commissioning of robot systems, as well as recommended procedures, safeguarding and information required for use.
ISO TS 15066(ANSI RIA 15.606): Robots and robotic devices - Collaborative robots
Provides detailed guidance not found in ISO 10218 parts 1 or 2 for the safe use of industrial robots operating collaboratively.
Jacobian matrix
The Jacobian matrix relates the rates of change of joint values with the rates of change of endpoint co-ordinates. Essentially it is a set of algorithm calculations that are processed to control the positioning of a robot.
JOB
JOB is the Yaskawa name for a robot program created using Yaskawa’s INFORM robot programming language. Typically, a JOB consists of instructions that tell the robot controller what to do and data that the program uses when it is running.
Joint
A part of the manipulator system, which allows a rotation and/or translational degree of freedom of a link of end-effector.
Joint Interpolated Motion
A method of coordinating the movement of the joints, such that all joints arrive at the desired location simultaneously. This method of servo control produces a predictable path regardless of speed and results in the fastest pick and place cycle time for a particular move.
Joint Motion Type
Also known as Point-to-Point Motion, Joint Motion Type is a method of path interpolation that commands the movement of the robot by moving each joint directly to the commanded position so that all axis arrive to the position at the same time. Although the path is predictable, it will not be linear.
Joint Space
a. Joint Space (or Joint Coordinates) is just a method of defining the position of the robot in terms of the value of each axis instead of as a TCP position. For example, the Home Position of a robot is often defined in Joint Space as each axis being at 0 degrees.
b. The set of joint positions.
Joints
The parts of the robot arm which actually bend or move.
Kinematics
The relationship between the motion of the endpoint of a robot and the motion of the joints. For a Cartesian Robot this is a set of simple linear functions (linear tracks that may be arranged in X, Y, Z directions), for a revolute topology (joints that rotate) however, the kinematics are much more complicated involving complicated combinations of trigonometry functions. The kinematics of an arm is normally split into forward and inverse solutions.
Ladle Gripper
An end-effector, which acts as a scoop. It is commonly used to scoop up liquids, transfer it to a mold and pour the liquid into the mold. Common for handling molten metal under hazardous conditions. See End-effector.
Laser
Acronym for Light Amplification by Stimulated Emission of Radiation. A device that produces a coherent monochromatic beam of light which is extremely narrow and focused but still within the visible light spectrum. This is commonly used as a non-contact sensor for robots. Robotic applications include: distance finding, identifying accurate locations, surface mapping, bar code scanning, cutting, welding etc.
Linear Interpolated Motion
Is a method of path interpolation that commands the movement of the robot by moving each joint in a coordinated motion so that all axis arrive to the position at the same time. The path of the Tool Control Point (TCP) is predictable and will be linear.
Linear Motion Type
Is a method of path interpolation that commands the movement of the robot by moving each joint in a coordinated motion so that all axis arrive to the position at the same time. The path of the Tool Control Point (TCP) is predictable and will be linear.
Link
A rigid part of a manipulator, which connects adjacent joints.
Links
The static material, which connects the joints of an arm together. Thereby a kinematical chain is formed. In a human body, the links are the bones.
Load Cycle Time
A manufacturing or assembly line process term, which describes the complete time to unload the last work piece and load the next one.
Magnetic Detectors
Robot sensors that can sense the presence of ferromagnetic material. Solid-state detectors with appropriate amplification and processing can locate a metal object to a high degree of precision. See Sensor.
Manipulator
A machine or robotic mechanism of which usually consists of a series of segments (jointed or sliding relative to one another) for the purpose of grasping and/or moving objects (pieces or tools), usually in several degrees of freedom. The control of the manipulator may be by an operator, a programmable electronic controller or any logic system (for example cam device, wired, etc.) (ISO 8373)
See Arm, Wrist and End-effector
Manual Mode
See Teach Mode.
Material Handling
The process by which an industrial robotic arm transfers materials from one place to another.
Material Processing Robot
A robot designed and programmed so that it can machine, cut, form or change the shape, function or properties of materials it handles between the time the materials are first grasped and the time they are released in a manufacturing process.
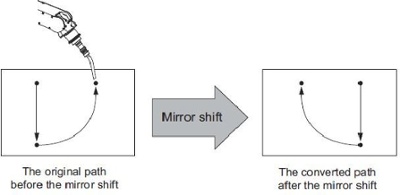 Mirror Shift Function
Mirror Shift Function
With the Mirror Shift Function, a job is converted to the job in which the path is symmetrical to that of the original job. This conversion can be performed for the specified coordinate among the X-Y, X-Z or Y-Z coordinate of the robot coordinates and the user coordinates. The Mirror Shift Function is classified into the following three: the Pulse Mirror Shift Function, the Robot Coordinates Mirror Shift Function and the User Coordinates Mirror Shift Function. (see figure at right)
Mode Switch
As per safety standards, an industrial robot has three distinct modes of operation. These are Teach (also called Manual) and Play (also called Automatic) and Remote. Switching between these modes is performed using a key switch on the teach pendant and is called Mode Switch.
Modularity
The property of flexibility built into a robot and control system by assembling separate units, which can be easily joined to or arranged with other parts or units.
Module
Self-contained component of a package. This component may contain sub-components known as sub-modules.
Motion Axis
The line defining the axis of motion either linear or rotary segment of a manipulator.
Motor
See Servo Motor.
Muting
While testing a robot program, the deactivation of any presence sensing safeguarding devices during the full robot cycle or a portion of the cycle.
Off-line Programming
A programming method where the task program is defined on devices or computers separate from the robot for later input of programming information to the robot. (ISO 8373)b. A means of programming a robot while the robot is functioning. This becomes important in manufacturing and assembly line production due to keeping productivity high while the robot is being programmed for other tasks.
Operator
The person designated to start, monitor and stop the intended productive operation of a robot or robot system. An operator may also interface with a robot for productive purposes. (R15.06)
Optical Encoder
A detection sensor, which measures linear or rotary motion by detecting the movement of markings past a fixed beam of light. This can be used to count revolutions, identify parts, etc.
Optical Proximity Sensors
Robot sensors which measure visible or invisible light reflected from an object to determine distance. Lasers are used for greater accuracy.
Orientation
The angle formed by the major axis of an object relative to a reference axis. It must be defined relative to a three dimensional coordinate system. Angular position of an object with respect to the robot's reference system. See Roll, Pitch and Yaw.
Palletizing
The process of stacking packages (i.e., boxes, bags, containers, etc.) in an organized fashion on a pallet.
PAM Function – Position Adjustment by Manual
Position Adjustment by Manual allows position adjustment by simple operations while observing the motion of the manipulator, and without stopping the manipulator. Positions can be adjusted in both teach mode and play mode.
Parallel Shift Function
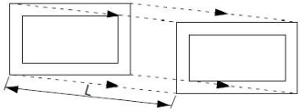 Parallel Shift refers to the shifting of an object from a fixed position in such a way that all points within the object move an equal distance. In the model for Parallel Shift shown in the following, the shift value can be defined as the distance L (three dimensional coordinate displacement). The Parallel Shift Function is relevant to the actual operation of the manipulator because it can be used to reduce the amount of work involved in teaching by shifting a taught path (or position). In the example in the figure below, the taught position A is shifted in increments of the distance L (this is actually a three dimensional XYZ displacement that can be recognized by the robot).
Parallel Shift refers to the shifting of an object from a fixed position in such a way that all points within the object move an equal distance. In the model for Parallel Shift shown in the following, the shift value can be defined as the distance L (three dimensional coordinate displacement). The Parallel Shift Function is relevant to the actual operation of the manipulator because it can be used to reduce the amount of work involved in teaching by shifting a taught path (or position). In the example in the figure below, the taught position A is shifted in increments of the distance L (this is actually a three dimensional XYZ displacement that can be recognized by the robot).
Path
The continuous locus of positions (or points in three dimensional space) traversed by the tool center point and described in a specified coordinate system. (R15.05-2)
Payload - Maximum
The maximum mass that the robot can manipulate at a specified speed, acceleration/deceleration, center of gravity location (offset), and repeatability under continuous operation over a specified working space. Maximum payload is specified in kilograms. (R15.05-2)
Pendant [Teach Pendant]
A hand-held input device, linked to the control system with which a robot can be programmed or moved. (ISO 8373) This enables the human operator to stand in the most favorable position to observe, control and record the desired movements in the robot's memory.
Pendant Teaching
The mapping and recording of the position and orientation of a robot and/or manipulator system as the robot is manually moved in increments from an initial state along a path to a final goal state. The position and orientation of each critical point (joints, robot base, etc.) is recorded and stored in a database for each taught position the robot passes through on its path toward its final goal. The robot may now repeat the path on its own by following the path stored in the database.
Performance Level d (PLd)
ISO Performance Level (PL) “d” means that the average probability of dangerous failure per hour of the safety related parts of the control system falls within ≥ 10-7 to < 10-6. Additionally, other factors such as proper installation, maintenance and protection against environmental factors also apply. This is the minimum performance level specified in ISO 10218-2 section 5.2.2, unless a risk assessment would allow a lower value to be used.
Performance Level e (PLe)
ISO Performance Level (PL) “e” means that the average probability of dangerous failure per hour of the safety related parts of the control system falls within ≥ 10-8 to < 10-7. Additionally, other factors such as proper installation, maintenance and protection against environmental factors also apply.
Pick and Place Cycle
The amount of time it takes for a manipulator to pick up an object and place it in a desired location, then return to its rest position. This includes time during the acceleration and deceleration phases of a particular task. The robot movement is controlled from one point location in space to another in a Point-to-Point (PTP) motion system. Each point is programmed into the robot's control memory and then played back during the work cycle.
Pick-and-Place Task
A repetitive part transfer task composed of a picking action followed by a placing action.
Pinch Points
A pinch point is any point at which it is possible for a person or part of a person’s body to be caught between moving parts of a machine, or between the moving and stationary parts of a machine, or between material and any part of the machine. A pinch point does not have to cause injury to a limb or body part, although it might cause injury – it only has to trap or pinch the person to prevent them from escaping or removing the trapped part from the pinch point.
Pitch
Rotation of the end-effector in a vertical plane around the end of the robot manipulator arm.
See Roll and Yaw.
Play Mode
After a robot is programmed in Teach Mode, the robot controller can be switched to Play Mode to execute the robot program. In Play Mode, the robot program is played back. This is the mode in which robots are used in production.
Playback Operation
Playback is the operation by which the taught job is played back. This function is used to decide where to resume the playback on the start operation after suspending the playback and moving the cursor or selecting other jobs. 0: Starts operation where the cursor is located in the job displayed at the moment. 1: The playback continuation window appears. Select “YES” and the playback resumes where the cursor has been located when the playback suspended. If “NO” is selected, the playback resumes where the cursor is located in the job displayed at the moment. Modes Switch on the programming pendant: PLAY – job is started up by [START] on the programming pendant and REMOTE job is started by a peripheral device (external start input).
Point-to-Point
Manipulator motion in which a limited number of points along a projected path of motion is specified. The manipulator moves from point to point rather than a continuous smooth path.
Pose
Alternative term for robot configuration, which describes the linear and angular position. The linear position includes the azimuth, elevation and range of the object. The angular position includes the roll, pitch and yaw of the object. See Roll, Pitch and Yaw.
Position
The definition of an object's location in 3D space, usually defined by a 3D coordinate system using X, Y and Z coordinates.
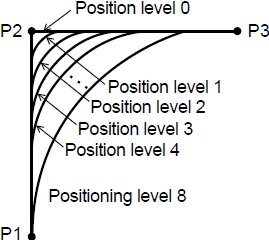 Position Level
Position Level
The position level is the degree of approximation of the manipulator to a taught position. The position level can be added to move instructions MOVJ (joint interpolation) and MOVL (linear interpolation). If the position level is not set, the precision depends on the operation speed. Setting an appropriate level moves the manipulator in a path suitable to circumferential conditions and the workpiece. (see figure at right)
Position Variables
Position Variables are used in a robot program (JOB) to define a location in 3D space, usually defined by a 3D coordinate system using X, Y and Z coordinates. As it is a variable, the value can change depending on conditions or on information passed to the JOB.
Power and Force Limiting (PFL)
Collaborative feature that allows both the operator and robot to work in proximity to one another by ensuring the robot will slow down and stop before a contact situation occurs. In order for this feature to be safely implemented, functional safety and additional detection hardware must be used. A risk assessment shall be used determine if any additional safeguarding is necessary to mitigate risks within the robot system.
Presence-sensing Safeguarding Device
A device designed, constructed and installed to create a sensing field to detect an intrusion into such field by people, robots or objects. See Sensor.
Programmable Logical Controller (PLC)
A solid-state control system, which has a user programmable memory for storage of instructions to implement specific functions such as: I/O control logic, timing, counting arithmetic and data manipulation. A PLC consists of a central processor, input/output interface, memory and programming device, which typically uses relay equivalent symbols. The PLC is purposely designed as an industrial control system, which may perform functions equivalent to a relay panel or a wired solid-state logic control system, and may be integrated into the robot control system.
Programmable Robot
A feature that allows a robot to be instructed to perform a sequence of steps and then to perform this sequence in a repetitive manner. It can then be reprogrammed to perform a different sequence of steps if desired.
Proximity Sensor
A non-contact sensing device used to sense when objects are a short distance away, and it can determine the distance of the object. Several types include: radio frequency, magnetic bridge, ultrasonic and photoelectric. Commonly used for: high speed counting, sensing metal objects, level control, reading coding marks and limit switches. See Inductive Sensor.
Pulse Coordinates
Yaskawa robots define robot joint axes position in degrees for revolute joints. Pulse is also another way to specify robot joint position, and it does so in robot motor encoder pulse counts.
Quality Assurance (QA)
Describes the methods, policies and procedures necessary to conduct quality assurance testing during design, manufacturing and deliver phases of creating, reprogramming, or maintaining robots.
Reach: The volume of space (envelope), which a robot's end-effector can reach in at least one orientation.
Quasi-static Clamping
A type of contact between a person and part of a robot system where the body part can be clamped between the moving part of the robot system & another fixed or moving part of the robot cell
Reach
The volume of space (envelope), which a robot's end-effector can reach in at least one orientation.
Real-time System
A computer system in which the computer is required to perform its tasks within the time restraints of some process simultaneously with the system it is assisting. The computer processes system data (input) from the sensors for the purpose of monitoring and computing system control parameters (outputs) required for the correct operation of a system or process. The computer is required to do its work fast enough to keep pace with an operator interacting with it through a terminal device (such as a screen or keyboard). The operator interacting with the computer has access, retrieval and storage capability through a database management system. System access allows the operator to intervene and alter the system's operation.
Record-playback Robot
A manipulator for which the critical points along desired trajectories are stored in sequence by recording the actual values of the joint-position encoders of the robot as it is moved under operational control. To perform the task, these points are played back to the robot's servo-system. See Servo-system.
Rectangular-Coordinate Robot
A robot whose manipulator arm moves in linear motions along a set of Cartesian or rectangular axis in X, Y and Z directions. The shape of the work envelope forms a rectangular figure. See Work Envelope.
Reliability
The probability or percentage of time that a device will function without failure over a specified time period or amount of usage (R15.02). Also called: the robot's uptime or the Mean Time Between Failure (MTBF).
Remanufacture
To upgrade or modify robots to the revised specifications of the manufacturer. (R15.06)
Remote Mode
Remote Mode is a type of Play Mode where the automatic execution of robot program is initiated from an external device (not the teach pendant). During this mode, the use of the teach pendant is disabled.
Repeatability
A measure of how close an arm can repeatedly obtain a taught position. For instance: once a manipulator is manually placed in a particular location and this location is resolved by the robot, the repeatability specifies how accurately the manipulator can return to that exact location. The degree of resolution within the robot control system determines the repeatability. In general, an arm's repeatability can never be better than its resolution. See Teach and Accuracy.
Resolution
The amount of robot joint motion required for the position sensing to change by one count. Although the resolution of each joint feedback sensor is normally constant, the resolution of the endpoint in world coordinates is not constant for revolute arms, due to the non-linearity of the arm's kinematics.
Revolute Joint
The joints of a robot, which are capable of rotary motion.
Risk Assessment
The process of evaluating the intended use of a machine or system for foreseeable hazards and then determining the level of risk involved for the tasks identified.
Risk Mitigation
A secondary step in the risk assessment process that involves reducing the level of risk for the identified tasks, by applying risk reduction measures in order to eliminate or mitigate the hazards.
Robot
A re-programmable, multifunctional manipulator designed to move material, parts, tools or specified devices through variable programmed motions for the performance of a variety of tasks. Common elements which make up a robot are: controller, manipulator and end-effector. See Manipulator, Controller and End-effector.
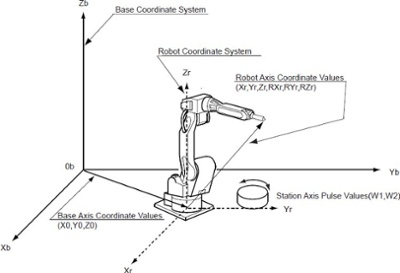 Robot Coordinate System
Robot Coordinate System
The Robot Coordinate System is defined in the base axis of a Robot, and points in the Robot Coordinate System will be relative to the base of the robot. Note that by default the Base Coordinate System and Robot Coordinate System are the same. (see figure at right)
Robot Integrator
See Integrator.
Robot Programming Language
An interface between a human user and a robot, which relates human commands to the robot.
Robot Range Limit Monitoring
Monitors the manipulator arm or its tool to be in the designated safety area
Robot Simulation
A method for emulating and predicting the behavior and the operation of a robotic system based on the model (i.e.,. computer graphics) of the physical system. (R15.07)
Roll
Rotation of the robot end effector in a plane perpendicular to the end of the manipulator arm. See Pitch and Yaw.
Rotary Joint
A joint which twists, swings or bends about an axis.
Rotary Vector Drive (RV)
A brand name for a speed reduction device that converts high speed low torque to low speed high torque, usually used on the major (larger) axis . See Cyclo Drive and Harmonic Drive.
Rotational Motion
A joint which twists, swings or bends about an axis. An example of this is the elbow of a human arm.
Safeguard
A barrier guard, device or safety procedure designed for the protection of personnel. (R15.06)
Safety Integrity Level
Safety Integrity Level (SIL) is IEC’s method for determining the performance level of a safety system. SIL 2 corresponds to ISO Performance Level “d”, and SIL 3 corresponds to ISO Performance Level “e”. ISO 10218 allows for the use of either.
Safety Logic Circuit
The safety logic circuit monitors safety critical external devices such as the light curtains and FSU generated signals. The safety logic circuit is programmed via an intuitive user interface that is supported on the Yaskawa programming pendant. It enables to set up the logical operations, such as stopping the manipulator or outputting a signal if the servos are on.
Safety Monitored Stop
Collaborative feature designed to allow safe human-robot interaction. Only when robot motion ceases can the human safety enter the collaborative workspace. Servos can remain energized in accordance with a category 2 stop in accordance with ISO 10218-1:2011, 5.4. A risk assessment shall be used to determine if any additional safeguarding is necessary to mitigate risks within the robot system.
SCARA Robot
A cylindrical robot, having two parallel rotary joints (horizontally articulated) and provides compliance in one selected plane. (ISO 8373) Note: SCARA derives from Selectively Compliant Arm for Robotic Assembly
Second Home Position
Apart from the “home position” of the manipulator, the second home position can be set up as a check point for absolute data. The initial value of the second home position is the home position (where all axes are at pulse 0). The second home position can be changed.
Security Mode
Levels of operator modes on Yaskawa robot controllers, include: Operation Mode, Edit Mode, Management Mode, Safety Mode and One Time Management mode.
Sensor
Instruments used as input devices for robots, which enable it to determine aspects regarding the robot's environment, as well as the robot's own positioning. Sensors respond to physical stimuli (such as heat, light, sound, pressure, magnetism and motion), and they transmit the resulting signal or data for providing a measurement, operating a control or both. (R15.06)
Sensory Feedback
Variable data measured by sensors and relayed to the controller in a Closed-loop System. If the controller receives feedback that lies outside an acceptable range, then an error has occurred. The controller sends an error signal to the robot. The robot makes the necessary adjustments in accordance with the error signal.
Servo Control
The process by which the control system of the robot checks if the attained pose of the robot corresponds to the pose specified by the motion planning with required performance and safety criteria. (ISO 8373)
Servo Motor
An electrical power mechanism used to effect motion or maintains position of the robot (for example, a motor which converts electrical energy to effect motion of the robot) (R15.07). The motor responds to a signal received from the control system and often incorporates an encoder to provide feedback to the control loop.
Servo Pack
An alternating, current electrical power mechanism that is controlled through logic to convert electrical supply power that is in a sine wave form to a Pulse Width Modulated (PWM) square form, delivered to the motors for motor control: speed, direction, acceleration, deceleration and braking control.
Servo-controlled Robot
The control of a robot through the use of a Closed-loop Servo-system, in which the position of the robot axis is measured by feedback devices and is stored in the controller's memory. See Closed-loop System and Servo-system.
Servo-system
A system in which the controller issues commands to the motors, the motors drive the arm, and an encoder sensor measures the motor rotary motions and signals the amount of the motion back to the controller. This process is continued many times per second until the arm is repositioned to the point requested. See Servo-controlled Robot
Shock Detection Function
Shock detection is a function supported by the Yaskawa robot controller that reduces the impact of a robot collision by stopping the manipulator without any external sensor when the tool or the manipulator collide with a peripheral device.
Shoulder
The first or second axis of a robot is sometimes referred to as a shoulder axis as it somewhat resembles a human shoulder. This is often used in describing humanoid or dual-arm systems such as the Yaskawa Motoman® SDA10D.
SIL
See Safety Integrity Level
Simulation
A graphical computer program that represents the robot and its environment, which emulates the robot's behavior during a simulated run of the robot. This is used to determine a robot's behavior in certain situations, before actually commanding the robot to perform such tasks. Simulation items to consider are: the 3D modeling of the environment, kinematics emulation, path-planning emulation and simulation of sensors. See Sensor, Forward Kinematics and Robot.
Singularity
A configuration where two joints of the robot arm become co-axial (aligned along a common axis). In a singular configuration, smooth path following is normally impossible and the robot may lose control. The term originates from the behavior of the Jacobian matrix, which becomes singular (i.e., has no inverse) in these configurations.
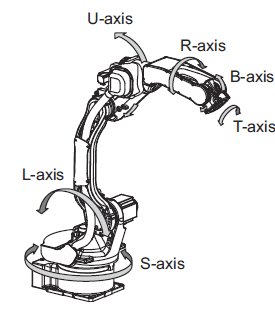 SLURBT
SLURBT
SLURBT are terms that Yaskawa Motoman uses to describe each axis of the robot for convenience. The definition of each value is as follows:
S – Swing or Swivel
L – Lower Arm
U – Upper Arm
R – Rotate
B – Bend
T – Twist
Softlimit Setting Function
The Softlimit Setting Function is a function to set the axis travel limit range of the manipulator motion in software.
Speed and Separation Monitoring
Collaborative feature that allows both the operator and robot to work in proximity to one another by ensuring the robot will slow down and stop before a contact situation occurs. In order for this feature to be safely implemented, functional safety and additional detection hardware must be used. A risk assessment shall be used to determine if any additional safeguarding is necessary to mitigate risks within the robot system.
Spline
A smooth, continuous function used to approximate a set of functions that are uniquely defined on a set of sub-intervals. The approximating function and the set of functions being approximated intersect at a sufficient number of points to insure a high degree of accuracy in the approximation. The purpose for the smooth function is to allow a robot manipulator to complete a task without jerky motion.
Spline Motion Type
A calculated path that the robot executesthat may be parabolic in shape. A spline motion may also accomplish a free form curve with mixtures of circular and parabolic shapes.
System Integrator
See Integrator.
Teach
To program a manipulator arm by manually guiding it through a series of motions and recording the position in the robot controller memory for playback.
Teach Lock
While the Teach Lock is set, the mode of operation is tied to the Teach Mode and the machines cannot be played back using either [START] or external input. For safety purposes, always set the mode switch to “TEACH” before beginning to teach.
Teach Mode
A robot controller mode in which a robot manipulator is programmed by manually guiding it through a series of motions and recording the position in the robot controller memory for playback. Industrial robots that do not have an active Power and Force Limiting Function require the use of a Three Position Enable Switch in Teach Mode.
Teach Pendant
A handheld control box, which is used by an operator to remotely guide a robot through the motions of its tasks. The motions are recorded by the robot control system for future playback. Modern industrial robots come with programming pendants, which not only allow robot teaching, but also support full feature robot programming and safety user interface.
Teaching Window
Teaching Window is a user interface screen on the programming pendant. This window contains the JOB CONTENT window and teaching is conducted within this window. The JOB CONTENT window contains the following items: line numbers, cursor, instructions, additional items, comments, etc.
Through-beam
An object detection system used within a robot's imaging sensor system. A finely focused beam of light is mounted at one end and a detector at the other. When the beam of light is broken, an object is sensed.
Time Measuring Function
Time measuring function measures the execution time for the specified section in the job or the signal output time of the specified signal.
Tool
A term used loosely to define a working apparatus mounted to the end of the robot arm, such as a hand, gripper, welding torch, screw driver, etc. See Arm, Gripper and End-effector.
Tool & arm Interference
In a system with one controller and multiple manipulators, the Tool & Arm Interference Check Function can be used to detect possible interference to avoid collision during operation. The following three patterns can be checked:
-
Arm against arm
-
Arm against tool
-
Tool against tool
Interference is checked by using a cylinder that is slightly larger than the arm or tool. A sphere is placed on both ends of the cylinder. If the cylinder and spheres of one manipulator have any contact with those of the other while moving, the manipulators stop because interference was detected.
 Tool Center Point (TCP)
Tool Center Point (TCP)
The Tool Center Point (TCP) defines the tip of the current tool as defined relative to the tool flange. For example, for a welding robot, the TCP will generally be defined at the tip of the welding gun. After defining and configuring the TCP, the robot motion will be defined relative to this frame (i.e., rotation in the Rx direction would cause rotation around the X-axis and positions will be taught in this frame.
Tool Control Point
See Tool Center Point
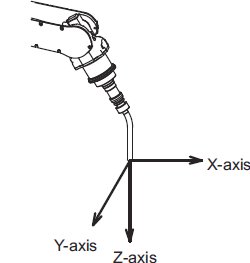
Tool Coordinates
When the tool attached to the robot moves, so does its tool coordinate system in reference to a fixed coordinate system, for example, world coordinates. In general, the tool coordinates do not align with the world XYZ coordinates.
Tool Frame
A coordinate system attached to the end-effector of a robot (relative to the base frame).
Touch Sensor
Sensing device, sometimes used with the robot's hand or gripper, which senses physical contact with an object, thus giving the robot an artificial sense of touch. The sensors respond to contact forces that arise between themselves and solid objects.
Trajectory Generation (Calculation)
The computation of motion functions that allow the movement of joints in a smooth controlled manner.
Transducer
A device that converts energy from one form to another. Generally, a device that converts an input signal into an output signal of a different form. It can also be thought of as a device which converts static signals detected in the environment (such as pressure) into an electrical signal that is sent to a robot's control system.
Uptime
A period of time in which a robot or production line is operating or available to operate, as opposed to downtime.
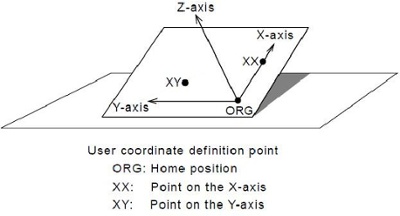
User Coordinate Setting
User coordinates are defined by three points that have been taught to the manipulator through axis operations. These three defining points are ORG, XX, and XY, as shown in the diagram below. These three points of positional data are registered in a user coordinate file. ORG is the home position, and XX is a point on the X-axis. XY is a point on the Y-axis side of the user coordinates that has been taught, and the directions of Y- and Z-axes are determined by point XY.
User Coordinate System
 The User Coordinate System is any reference point that a user has defined for their application. This is often attached to an object such as a pallet and allows a user to teach points relative to this object. For example, a set of position could be taught relative to a User Coordinate System attached to a pallet and then easily transferred to a different User Coordinate System on another pallet. This allows for positions to be reused efficiently. See also, User Coordinate Setting
The User Coordinate System is any reference point that a user has defined for their application. This is often attached to an object such as a pallet and allows a user to teach points relative to this object. For example, a set of position could be taught relative to a User Coordinate System attached to a pallet and then easily transferred to a different User Coordinate System on another pallet. This allows for positions to be reused efficiently. See also, User Coordinate Setting
Vacuum Cup Hand
An end-effector for a robot arm which is used to grasp light to moderate weight objects, using suction, for manipulation. Such objects may include glass, plastic; etc. Commonly used because of its virtues of reduced object slide slipping while within the grasp of the vacuum cup. See End-effector.
Vision Guided
Control system where the trajectory of the robot is altered in response to input from a vision system.
Vision Sensor
A sensor that identifies the shape, location, orientation, or dimensions of an object through visual feedback, such as a television camera.
Work Envelope
The set of all points which a manipulator can reach without intrusion. Sometimes the shape of the work space, and the position of the manipulator itself can restrict the work envelope.
Work Envelope (Space)
The volume of space within which the robot can perform given tasks.
Work Home Position
The Work Home Position is a reference point for manipulator operations. It prevents interference with peripheral device by ensuring that the manipulator is always within a set range as a precondition for operations such as starting the line. The manipulator can be moved to the set Work Home Position by operation from the programming pendant, or by signal input from an external device. When the manipulator is in the vicinity of the Work Home Position, the Work Home Position signal turns ON.
Work Piece
Any part which is being worked, refined or manufactured prior to its becoming a finished product.
Workspace
The volume of space within which the robot can perform given tasks.
World Coordinates
A reference coordinate system in which the manipulator arm moves in linear motions along a set of Cartesian or rectangular axes in X, Y, and Z directions. The shape of the work envelope forms a rectangular figure. See Rectangular Coordinates.
World Model
A three dimensional representation of the robot's work environment, including objects and their position and orientation in this environment, which is stored in robot memory. As objects are sensed within the environment the robot's controller system continually updates the World Model. Robots use this World Model to aid in determining its actions in order to complete given tasks.
Wrist
A set of rotary joints between the arm and the robot end-effector that allow the end-effector to be oriented to the work-piece. In most cases the wrist can have degrees of freedom which enable it to grasp an object with roll, pitch, and yaw orientation. See Arm, End-effector, Roll, Pitch, Yaw and Work Piece.
Wrist [Secondary Axis]
An interconnected set of links and powered joints between the arm and end- effector, which supports, positions and orientates the end effector. (ISO 8373)
Yaw
Rotation of the end-effector in a horizontal plane around the end of the manipulator arm. Side to side motion at an axis. See Roll and Pitch.